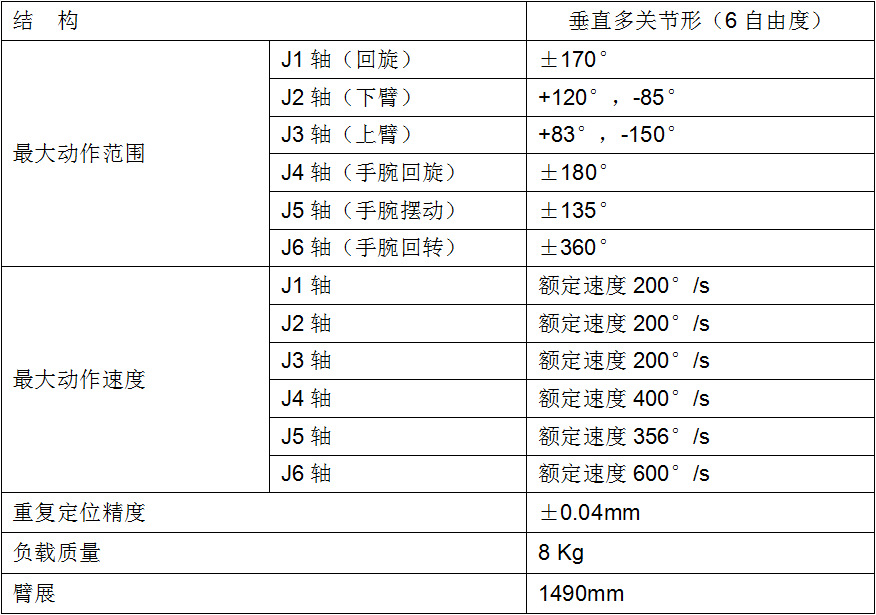
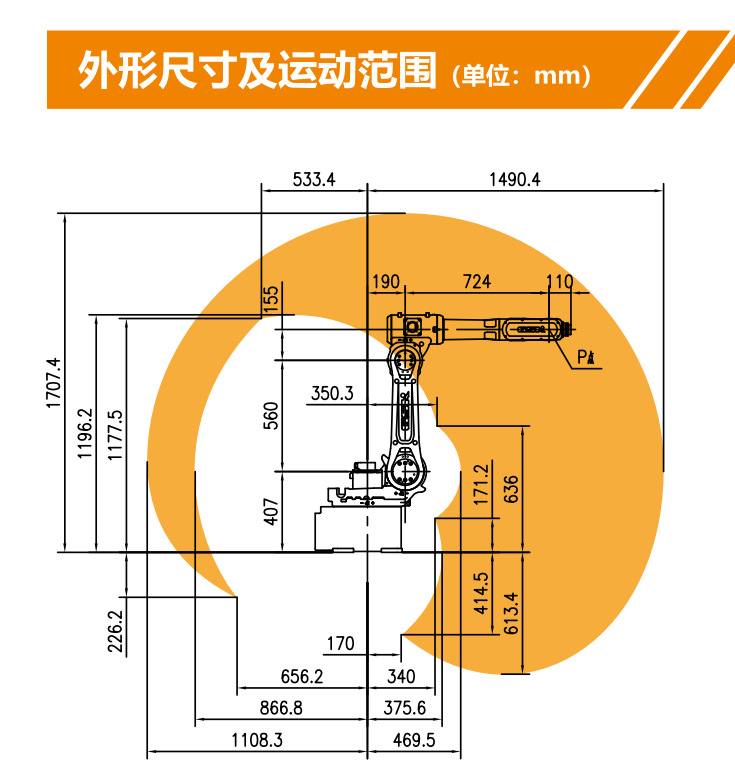
活塞杆表面修复堆焊焊接机器人
活塞杆表面修复对焊焊接机器人系统由一套焊接机器人系统,一套超宇Pulse MIG-500全数字脉冲焊接电源,一套控制系统,二套伺服控制变位机,一套清枪剪丝装置构成,其中焊接机器人与伺服变位机可以实现联动7轴焊接控制,保证焊接位置,同时采用双变位机的双工位控制,可以大大提高焊接效率。
系统主要特点:
1、 采用机器人自动焊接,替代人工对活塞杆表面进行补焊堆焊,大大提高生产效率。
2、 采用螺旋焊接方式,通过焊接电流电压、行走速度和旋转速度的控制,可以调节表面堆焊的厚度和紧密程度,实现表面美观、整洁、飞溅少。
3、 采用双工位控制,减少人工吊装的停机时间,保证机器人时刻工作。
4、 采用机器人堆焊后,只需要对表面进行车加工,不需要进行二次电镀处理,节省了工艺处理时间。
采用一人看多台机器人多工位,可更加提高工作效率和节省人工。